To get this behavior, we've made three very strong assumptions: 1) we both have perfect information about our relative positions 2) we can gather and process the information with no delay, and 3) we have instant control of our x velocity. In the next few posts we'll try relaxing each of those assumptions individually to see what impact they have on their own, and then create a model closest to reality in which these two handicaps conspire together.
Lets first see what happens when one of us doesn't have perfect information. I don't actually make my decision about how to walk based upon your actual position, but upon my perception of your position, and you the same with my position. This is where error is introduced to the system:

Perhaps for some reason my estimation of our relative x positions is off by .5 meters. How does this change my behavior? If you still have perfect estimation of my position, and would normally cross me to my left, but I perceive you being further to the right than you actually are, then I also move to my left:
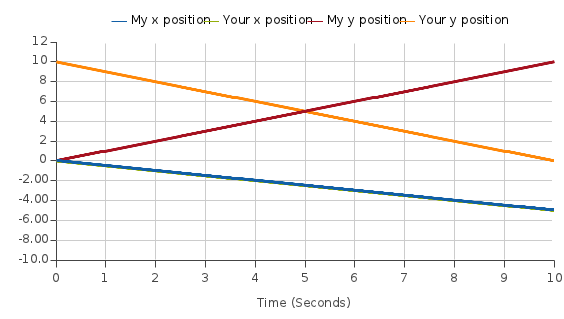
Meaning that we collide (at 5 seconds, when our y positions intersect) and we walk over 2 meters out of our ways in order to do so! If I have error in the opposite direction, then I don't move out of your way (because I assume we have enough clearance) and I force you to move farther than you would otherwise have needed to:

To experiment with this model, visit: http://insightmaker.com/insight/2262
If we both have an error:

We get the same qualitative behavior, because our errors combine in a linear fashion without delay.

To experiment with the two-error model, visit: http://insightmaker.com/insight/2426