
Our project took the general principles of the seed and added a propeller, such that the vehicle could sustain itself in flight, and climb; and an aileron on the trailing edge of the wing, to provide control. We added a control board that sensed the position of the vehicle and translated the pilot's commands into a cyclic aileron signal.

This type of vehicle has the maneuverability of a helicopter - the ability to hover in place and translate in six directions - and has fewer moving parts than either a helicopter or a fixed wing aircraft. By (very carefully) adjusting the weight distribution of the vehicle, it can also be made to have a passively stable hover, as Woody demonstrates (and we both celebrate) in this video:
Notice the similarity with the way maple seeds themselves remain in a reasonably fixed column of air as they descend:
<<Video of maple seed descent - when youtube uploads start behaving>>
If a vehicle such as this could be successfully controlled, it could provide a cheap, robust alternative to existing drones helicopters. That control, though, isn't simple.
To begin moving forward, the operator tilts the disk of rotation such that the vehicle directs a component of its lift force in the direction of desired travel, as you can see in the second image of this diagram. Its a very small component, luckily, and because cos(gamma) ~ 1 for small gamma, we don't loose too much lift.

Of course, the vehicle is essentially an enormous gyroscope, so in order to tilt the disk one way, you need to provide cyclic lift 90 degrees of revolution out of phase from the direction you want to turn:
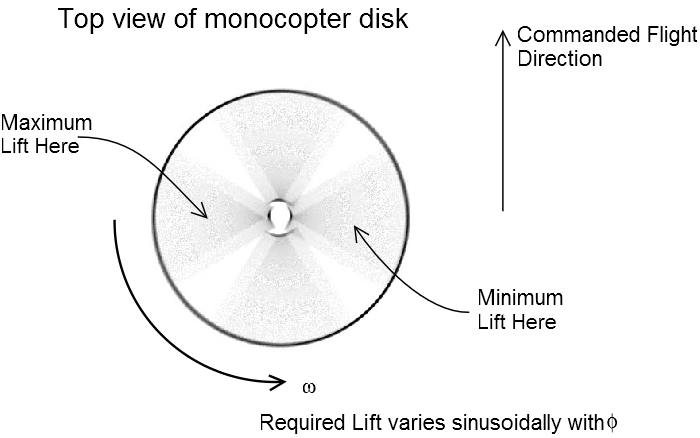
Which (as we could have already guessed) requires us to have a very good estimate of angular position. This is where not-being-a-helicopter becomes a challenge. A helicopter has an easy way of identifying forwards, as it's defined by the fuselage of the vehicle. On a monocopter, there is no fuselage, and so we have to find an external reference frame to orient the vehicle to. We chose to use a magnetometer.
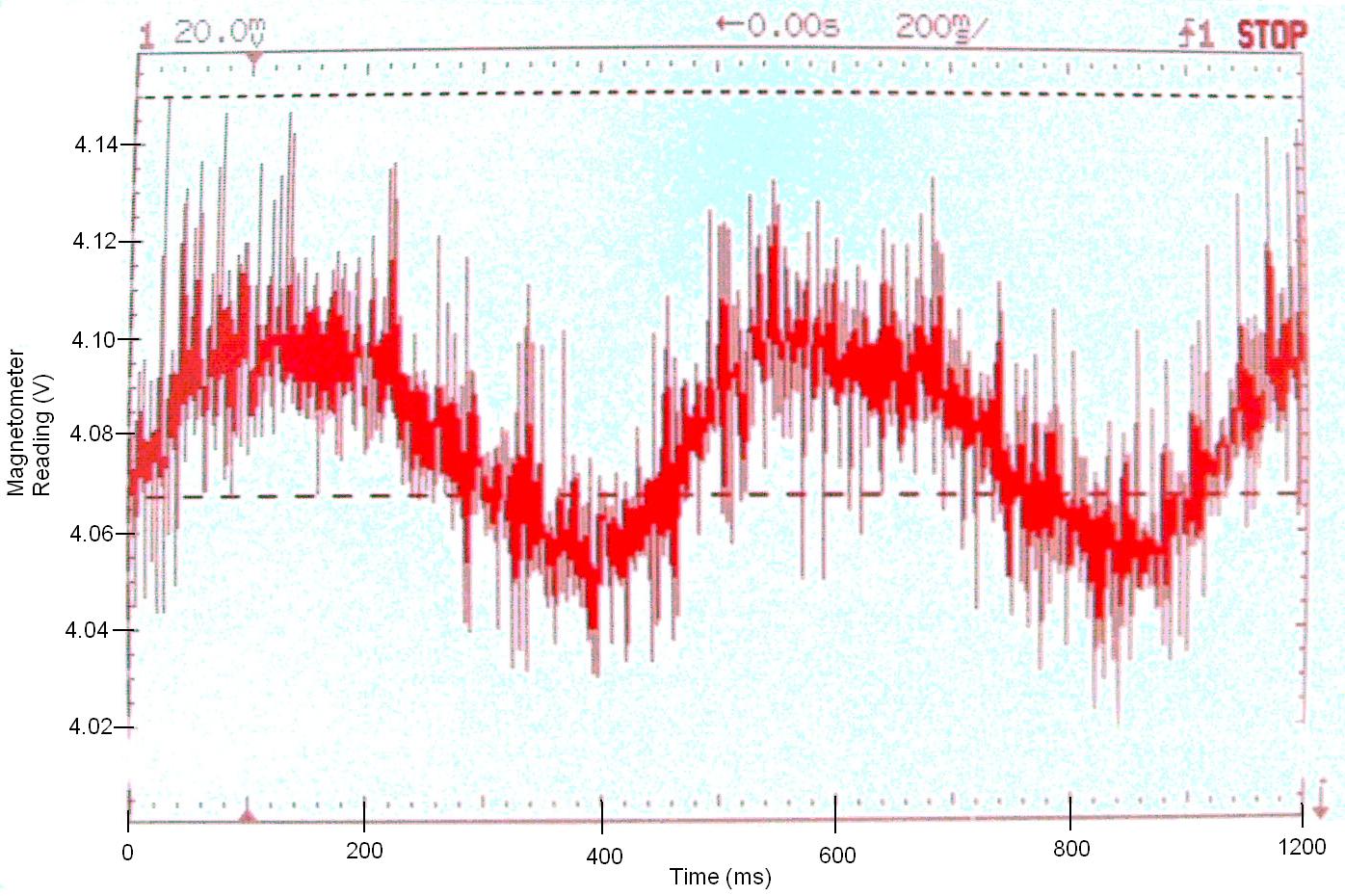
As the vehicle spins, the magnetometer is picking up on the magnetic field of the earth, and giving us a sinusoidal signal. Here's an oscilloscope image of the signal during benchtop testing:
On the actual flight hardware, we get a bit of a cleaner signal, but we still have to use a digital low pass filter:
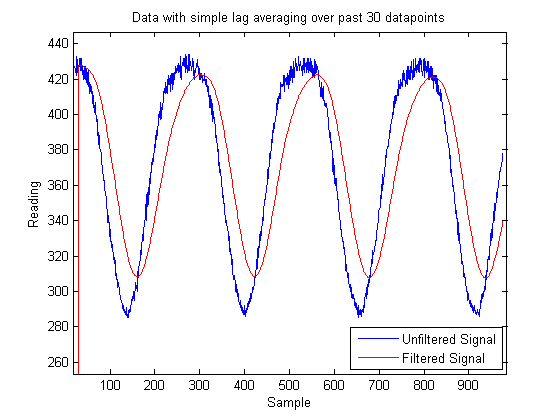
The filter introduces a lag, which for us becomes a phase offset in where we need to generate lift in order to tilt forwards. Ideally we would now be able to use a phase locked loop type algorithm to identify our position in the cycle, but (planning strikes again) our microprocessor can't run the algorithms fast enough. We ended up creating a simplified algorithm that identifies when the magnetometer signal crosses a fixed threshold with a positive slope (less lag involved than finding a maximum) and calling it north.

We flashed lights on the wing to tell the pilot "this way is forwards' and then gave the pilot the ability to 'yaw' the vehicle with a software offset.
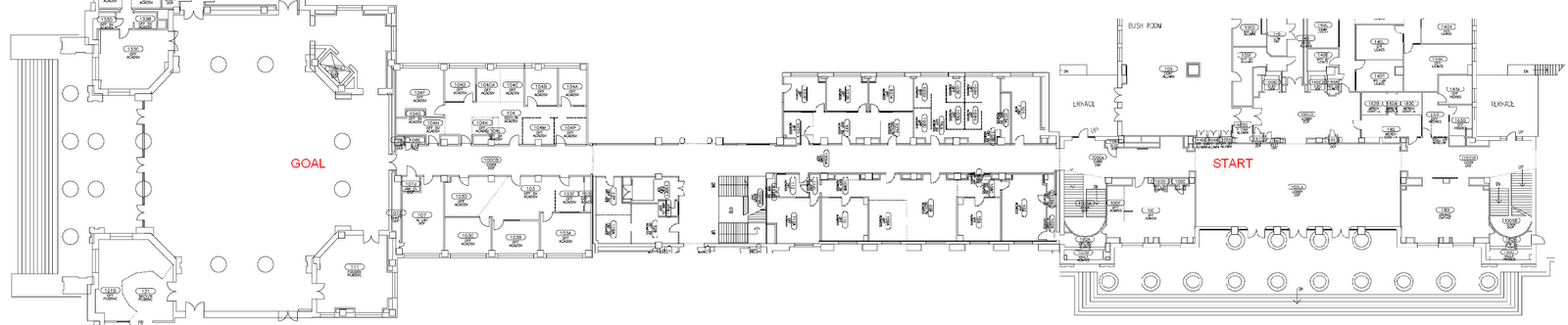
To test the vehicle, we decided to try flying it down MIT's Infinite Coridoor. The section we navigated was ~200m long, by about ~2.5m wide, by ~4m high:
We were confident that the flight would demonstrate conclusively that we had good control of the vehicle, as opposed to just flying it around in circles. As far as I'm concerned, it did!
I'll try and do a post on how we designed the avionics (and some of the other cool sensing and control elements), a post on the physics of the vehicle, and a post on who's using our research next. In the meantime, here are links to:
Our final report: Fly-by-wire Control of a Monocopter
Some Sample Test Data